az encoder jumps oct19
191109
Other links
azimuth encoder failures
Intro:
Azimuth encoder 1 (dome side) is used to
position the azimuth arm. Azimuth encoder 2 (ch side) is used to
measure the bending of the azimuth arm (enc1-enc2)
History:
- 12aug19: azimuth encoder 1 jumped by 1 tooth (.02
deg) (more
info).
- 11sep19 : azimuth encoder 1 put back to the correct position.
- 16oct19 : 8:30 am. azimuth arm stops moving with azimuth
banding error
- (this occurs when the az encoder difference is greater than
about .98 degrees.
Azimuth motions on day of bending failure (16oct19)
The plot shows the
azimuth arm motions on the morning of 16oct19 (prior to the
bending failure) (.ps) (.pdf)
- Top: azimuth position vs hour of day
- the telescope was mainly sitting at za=15deg (p1693) or
sitting at za=10 (x111).
- The red * show when the azimuth bending occurred.
- middle: azimuth encoder difference vs hour of day
- bottom: azimuth encoder difference vs azimuth position
- The green lines are +/- .01 degrees about the average value
of the azencdif 17-31oct19 (after we fixed the jumps)
- You can see that the the difference is about .04
degrees below the normal value.when things occurred.
When did the jumps occur
When an azimuth encoder jumps a tooth (.02
deg), the azimuth encoder difference will also jump.
The daily average of the azimuth encoder difference (computed
every 1 deg in azimuth) can show the days when things jumped
(since after the jump, the next daily average will still show the
step).
The az encoder
difference daily average is over plotted for 01oct19-07nov19 (.ps)
(.pdf)
- Each page over plots the encoder difference daily average
(avged to 1 deg in az).
- The top frame is in degrees, the bottom frame is
in encoder counts.
- The red lines are +/=- .01 degrees about the 16-31oct19
average values
- values at difference=0 are normally because the azimuth did
not arrive at that azimuth during the day (eg world day with
azimuth sitting).
- Page 1: 01-31 oct19
- There are 2 separate sets of data
- Page 2: 01-09oct19 first set of october data with no jumps
- Page 3: 10-15 oct19. this data is after a jump
- Page 4: 16-31oct19 - this is after the encoder was corrected
on 16oct19.
- Page 5: 01-07nov19.. no further jumps occurred
The following plots show days when jumps occurred.
az
encoder 2 jumps on 09oct19 (.ps) (.pdf)
- Top: az encoder difference around 21.076 hours
- The green line shows where the azimuth encoder difference
jumped
- middle: azimuth position during the jump
- The black line is az encoder 1 (dome side)
- The red line is az encoder 2 (ch side)
- The jump occurred at a dome azimuth of 313.75 degrees.
- bottom: linear fit to the azimuth positions during the jump
- The azimuth was moving at a constant velocity.
- Subtracting a linear fit to the position allows us to see
the jump
- The black line is enc1, the red line is enc2.
- The red line jumped, so the problem was with enc2 (ch side).
az encoder 2
jumps on 10oct19 (.ps) (.pdf)
- Top: enc dif vs hour.
- The jump occurred around 2.84 hours
- Middle: az position vs hr
- the jump occurred at 313.84 degrees (this is the same
position as the 09oct19 jump location)
- bottom: azimuth position - linear fit.
Correcting the jumps
Willie and Osvaldo went to check the encoders
after the azimuth bending stopped the motion on 16oct19 around
08:30
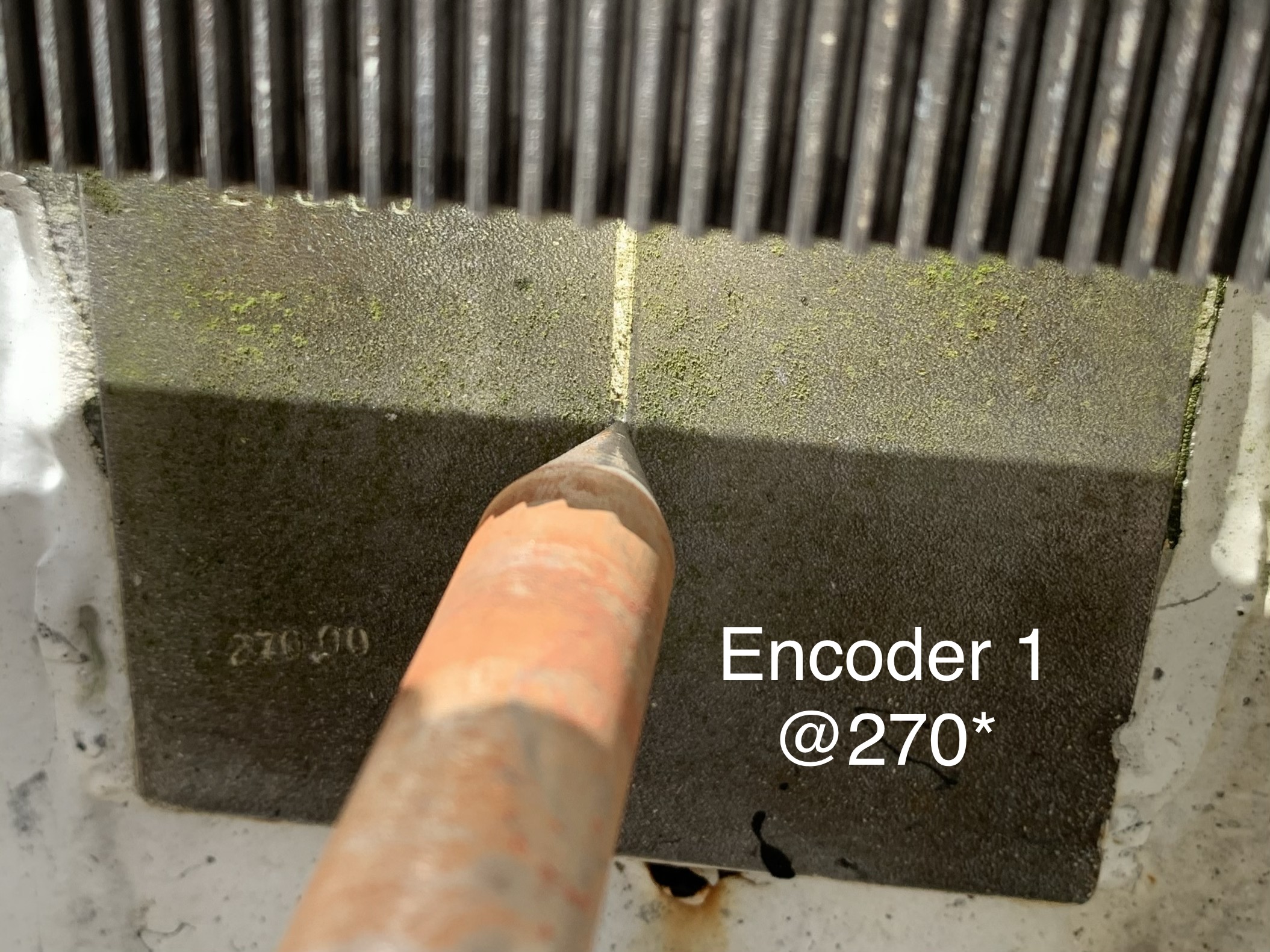
- They moved the azimuth to 270 degrees to see if the azimuth
pointer was still aligned with the index line.
- They had to unplug the ch encoder to get rid of the bending
error (only present when both encoders work).
- They found that the azimuth pointer was off by one tooth.
- The moved the telescope so the pointer aligned with the
scribe mark and then reset then encoder to 270 deg
- After moving enc1 by 1 tooth, the azimuth bending limit was
still very large.
- They then turned encoder 2 (ch side) 4 teeth so the bending
error was close to 0.
Pictures showing the azimuth pointer after
the encoder jumps were corrected.
- az encoder 1 after correcting 1 tooth jump
After correcting the encoders a CW and CCW spin was done to
measure the azimuth encoder difference. (.ps) (.pdf)
The pointing errors.
The 1 tooth jump in encoder 1 should have given a
pointing error of 0 to 20Asec when going from za 0 to 20deg.
I looked through the azencoder difference and did not find an
encoder 1 jump.
I also looked at the x102 pointing errors
- 12-13oct19 pointing errors (.ps) (.pdf)
- There is no obvious az pointing error ramp vs za
- 16oct-07nov19 - the calibration runs after the encoder 1
jump was corrected.
- If we incorrectly turned the encoder then we should
see a linear za ramp in az error.
- not obvious. the pink B2209+080 error at high za is probably
lost tension in the tiedowns.
We corrected an enc1 jump on 16oct19, but we did not see any
trace of this in the x102 data.
- If the error occurred between 13-16oct19 then we wouldn't see
it in the x102 data (since no runs during this time).
Summary:
- An azimuth bending error stopped the az telescope motion at
8:30 am 16oct19
- We found that az enc1 (dome side) had jumped 1 tooth.
- We had to turn the az enc2 (ch side) 4 turns to get back to a
usable azimuth encoder difference.
- Looking at the azimuth encoder differences 1-16oct19
- Enc2 jumped a tooth on 9oct19 and 10oct19
- Both of these jumps occurred when the dome azimuth read 313
degrees (we should recheck the ch encoder on the rack gear
when the azimuth reads313).
- The azimuth encoder now varies -.045 deg to +.02 degrees
in CW and CCW azimuth spins.
- We did not see the encoder 1 jump in the x102 pointing runs or
in the az encoder differences
- If the jump occurred after 13oct19 then we had no x102 data.
- It is possible we missed an encoder jump on the morning of
16jun19 (especially when the moved to 270 after the bending
error since az enc2 was unplugged.
processing: x101/191016/azencdifavg_oct_nov19.pro,azjump_09.pro,
azjump_10.pro,azdata_16.pro,azpnterr.pro
<-
page up
home_~phil
{kind=link}
{kind=link}
{kind=link}